In the never ending quest to try and improve print quality on my RepRap MendelMax 1.5 3D printer, I decided to try a belt-driven extruder. I recently replaced my original extruder's straight-cut gears with helical gears which caused a noticeable improvement to part quality. The next step would be to move to either a direct drive extruder or a belt / gear drive system. The direct drive extruders I've seen use 1.75mm filament, but I'm set up for 3mm filament and have many spools on hand. So, it's either a gear drive or belt drive. Gear drive systems still have some backlash- and a GT2 belt drive system will have almost none.
One choice that looked interesting was
Terawatt Industries' 00str00der belt-driven extruder kit. It was a drop-in replacement for my Wade's gear drive extruder, and their kit seemed to include everything for an easy build. I considered printing the parts myself,
(models found on thingiverse here) and sourcing all of the parts from the various sources. But, after taking into account parts costs and shipping, it wasn't a bad deal to buy the complete kit directly from Terawatt Industries. I also upgraded the motor at the same time- replacing my original small Nema 17 stepper I bought from the industrial surplus house and moved to a larger "standard" size Nema 17 stepper.
Unfortunately, the kit didn't come with any instructions, and those found online either on reprap.org or Terawatt's site were not very complete. I took photos and notes during assembly of my kit, hopefully they'll be helpful to someone.
 |
| Kit, as received from Terawatt Industries |
The belt-drive extruder kit arrived nicely packaged from Terawatt industries. The various "vitamins" were individually packaged from the printed parts.
 |
| Extruder body |
The part quality of the printed parts was acceptable, but not spectacular. One nice plus was they included two copies of the idler body- something that (in my experience) tends to fail over time.
 |
| Kit Printed Parts |
The "vitamins" included in the kit seemed to be decent quality, and complete.
 |
| Extruder Belt Drive Kit "Vitamins" |
Step 1: clean out filament hole in extruder body. I used a #28 0.140" drill
 |
| Cleaning out filament hole |
Step 2: Attach stepper (not included) to extruder body with M3x10 SHCS and M3 washers. (not included). M3x12 SHCS might be better, but I didn't have any available. Don't fully tighten screws, you'll be removing the stepper later.
 |
| Stepper Bolted on |
Step 3: Attach pulley to stepper.
 |
| Pulley in place |
Step 4: Get Hobbed bolt properly aligned. The bolt head should be on the "left" or non-drive side. 4x 8mm washers under the bolt head, and 2x 608 bearings aligned the hobbed portion of the bolt perfectly with the filament path in the extruder body.
 |
| Hobbed Bolt in position- note hobbing is directly aligned with filament path |
Step 5: Attach 608 bearing and large pulley to hobbed bolt on the "right" side of the hobbed bolt.
Step 6: Attach belt. To get the belt on, I removed the small pulley, put the belt on the large pulley, and carefully slid the small pulley back into position with the belt in place.
 |
| Belt attached |
Step 7: Tighten stepper bolts. This step isn't really necessary, as you'll be removing the stepper later to install it on the mounting plate and X-axis slide.
Step 8: Assembly Idler. Insert 8mm threaded stud into remaining 608 bearing, and press into idler. The idler required some cleanup with a x-acto knife for the 8mm threaded stud to fit. Press captive nut into idler body.
 |
| Idler, Assembled |
 |
| Other hardware for idler |
 |
| Captive nut in place |
Step 9: Install Idler. Attach to extruder body and insert fastening screw and tighten.
 |
| Idler attached |
Step 10: Clean out 4 mm nut traps for idler tensioner with X-acto & install 4mm nuts. The part quality of the printed extruder body was a bit dodgy here, and one wall of the nut trap ended up breaking when I was cleaning it out. So far it seems to work fine, but I might have to print a new body myself.
 |
| Cleaning out nut traps |
 |
| M4 nuts in nut traps |
Step 11: Install 4mm tensioner screws, washers, and rubber "springs"
 |
| Idler tension screws installed |
Step 12: At this point, I realized that I wasn't going to be able to install the assembled extruder head on my printer without doing some dis-assembly. The minimum amount of dis-assembly is to remove the belt and stepper motor. I stripped it all the way down for easier access to all of the hardware during mounting on the printer. Pre-assembling everything on the work bench is the way to go, though, as it's easier to trim edges and test fit parts before the extruder is on the printer.
 |
| Extruder, dis-assembled |
 |
| Extruder body attached to mounting plate |
 |
| M4 screw detail |
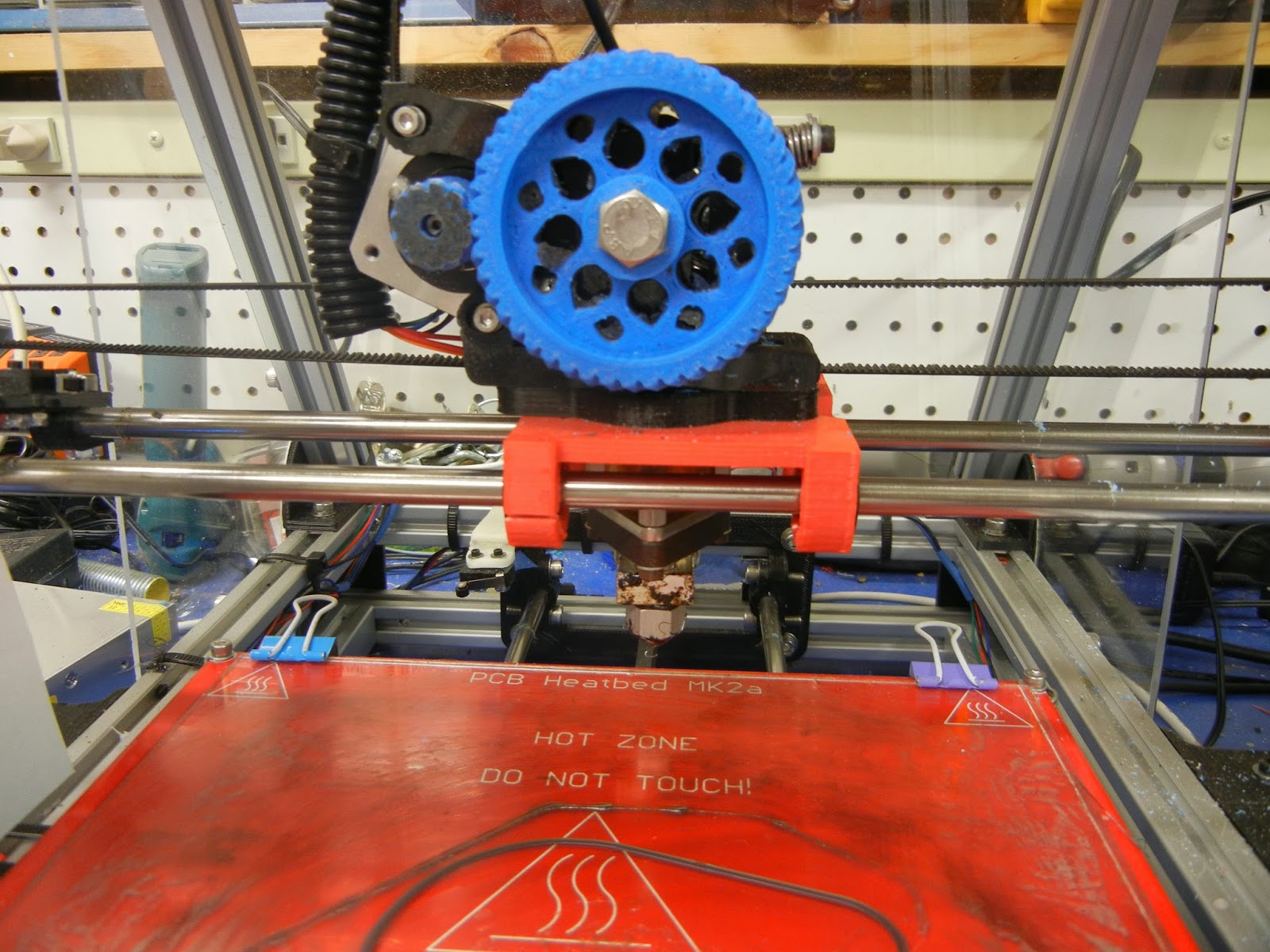
Step 13: Install on printer
 |
| Old extruder |
 |
| Old extruder removed, tail end of hot-end visible |
 |
| New extruder bolted into position with stepper installed |
 |
| Mounting bolt detail |
 |
| Idler & hobbed bolt install |
 |
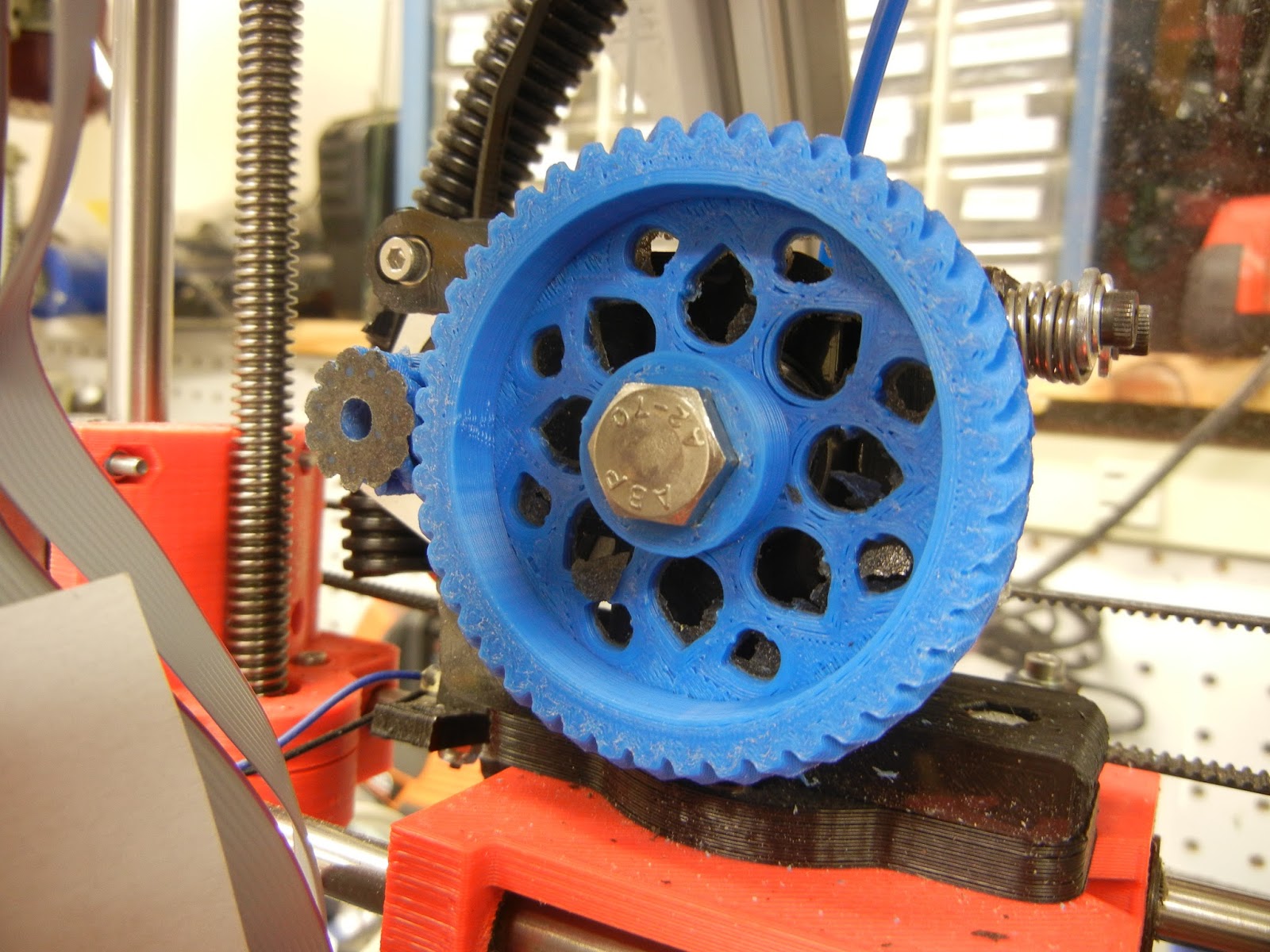
| Pulleys and belt re-installed |
 |
| Belt Detail |
 |
| Extruder backside detail |
So far I've done the initial tuning and printed a few small sample parts. After limited tuning my steps per mm setting was 535.3524.
Overall, the belt-drive 00str00der was an easy build and upgrade. My initial prints have looked pretty good, but I don't have enough data to say whether it improves part quality in a big way. At the very least it should be a more durable option, eliminating the need for extruder gear replacements. More details and a final opinion to follow.